一家中国皮革企业,正在把老师傅经验翻译成机器人可以理解的语言
当机器人第一次试图抓起一块真皮时,它并不知道自己该用多大的力。
力气太大,皮革会留下压痕;力气太小,又会在抓取时滑落。不同工艺、不同区域,都会带来完全不同的触觉反馈。人类老师傅摸一下就能判断的事情,对机器人来说,至今仍然缺乏系统化的数据描述。
而现在,一家中国皮革上市公司,正在尝试把这些经验变成机器人可以学习的数据。

大会主席王党校教授在第五届中国力触觉技术及应用会议开幕式上发言
2026年5月下旬,在北京举行的第五届中国力触觉技术及应用会议上,A股上市公司兴业科技(002674)与北京航空航天大学联合发布了《皮革视触觉数据白皮书》,以及一套名为LVT(Leather Visual-Tactile)Standard 的皮革视触觉数据标准草案。在这场由中国仪器仪表学会与北京航空航天大学联合主办、聚集了多位院士与头部机器人企业的年度盛会上,兴业科技的身影显得格外醒目。
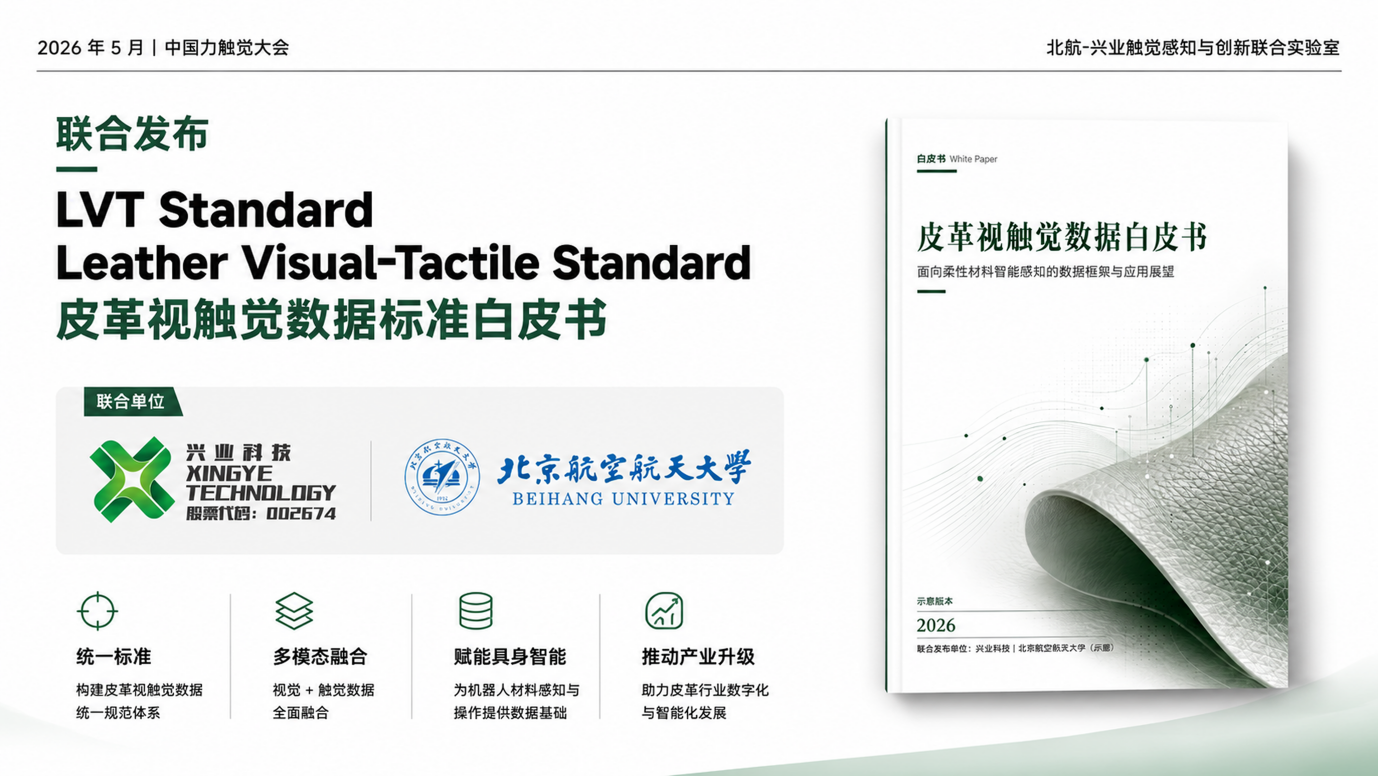
兴业科技与北京航空航天大学联合发布了《皮革视触觉数据白皮书》
大会期间,中国工程院赵沁平院士、中国工程院葛世荣院士、北京理工大学王涌天教授、东南大学宋爱国教授、北京航空航天大学王党校教授等多位专家莅临兴业科技展位参观指导。一行人深入了解兴业科技与北航触觉感知与创新联合实验室的最新研发成果,围绕相关成果展开深度交流。



赵沁平院士、葛世荣院士、王涌天教授、王党校教授等多位专家学者莅临兴业科技展位参观、交流
视觉让机器“看见”,触觉才能让它“进入”现实世界
过去几年,机器人的视觉能力进步迅速。目标识别、路径规划、空间理解——摄像头已经可以告诉机器人“眼前是什么”。但研究者正在意识到:光是“看见”,远远不够。
当机器人伸手去触碰一块皮革,它面对的是一个视觉无法回答的问题:这块皮软不软、滑不滑、按下去会不会留痕、该用多大的力抓起来而不损伤它。这些判断,需要的不是图像,而是触觉。
更根本的是,视觉数据可以从互联网批量获取,触觉数据不行。它必须物理接触才能采集,无法远程获得,不同皮源、工艺、批次之间几乎不可复用。这是一个真实存在的数据空白。
视觉让机器看见世界,但真正让它进入现实世界的,必须依赖于触觉。
为什么偏偏是皮革行业
要理解兴业科技这次为什么会出现在这个触觉大会上,需要先理解皮革的特殊性。
皮革是柔性材料里结构最复杂的品类之一。它不像金属或塑料,没有固定参数可以完整描述它。同一张皮革,背脊区的摩擦系数可能比腹侧区高出约19%,硬度差异可达24%;不同皮源、工艺、涂饰处理之间,手感差异更是几乎无法穷尽。
老师傅判断一块皮革的质地,靠的是“看一看、摸一摸、弯一弯、按一按”——这天然就是视觉与触觉的融合判断。这种经验长期只存活在人的手和脑子里,无法传承,无法量化,更无法被机器系统学习。
兴业科技恰好就是积累了几十年这类经验的企业。成立于1992年,2012年作为制革行业首家A股上市企业登陆深交所,客户涵盖运动鞋服、汽车内饰等领域的全球头部品牌,年产能超两亿平方英尺,是全球重要的天然皮革供应商之一。几十年生产中沉淀下来的材料样本、批次记录、工艺数据——这是一个庞大的隐性知识库,只是从未被系统地编码为机器可以学习的语言。
皮革制造与机器人触觉之间,原来隔着的不是行业,而是一套尚未被翻译出来的语言。
长期冷门的方向,正在变成紧迫的产业问题

兴业科技在大会分论坛上发布《皮革视触觉数据白皮书》暨LVT标准现场
很长一段时间里,机器人触觉并不是热门研究方向。
相比视觉模型的高速发展,触觉数据因为难采集、难标准化,进展一直缓慢。研究它的人不多,产业化的路径也不清晰。
北京航空航天大学机器人研究所王党校教授团队,是少数长期坚守这个方向的学术力量之一。他们一直在研究一个问题:机器人到底怎样才能真正“摸懂”现实世界。
而今天,随着具身智能的快速推进,这个曾经冷门的问题,正在变成一个越来越紧迫的产业课题。
兴业科技与北航王党校教授团队共同建立了“北航-兴业触觉感知与创新联合实验室”,分工明确:北航负责科学研究、算法模型与测量设备研发;兴业提供真实材料样本、产业场景与批次质检体系。两者的结合,是一端连接真实材料产业,一端连接具身智能应用的尝试。
给皮革“做一份档案”,让机器人先读再摸
两者合作的核心成果,是这套LVT标准(Leather Visual-Tactile Standard,皮革视触觉数据标准)。
它的逻辑,是把老师傅的经验拆解成机器可以读懂的档案。
一块皮革进入这套体系后,会得到一份完整的“材料档案”:L1材料身份层,记录皮革的品种、来源、鞣制工艺、涂饰、厚度规格,直接来源于兴业现有的生产管理系统;L2物理属性层,通过北航的专业设备,将静摩擦系数、硬度、法向刚度、弹性回复率等关键参数结构化为材料参数表示;L3空间属性图谱层,记录同一张皮革不同解剖区域的物性差异——哪里软、哪里硬、哪里摩擦力高——形成一张空间分布图;L4非典型条件状态层,记录皮革在不同条件下的物理行为响应参数,例如湿度对摩擦系数的影响、温度对硬度的影响等。
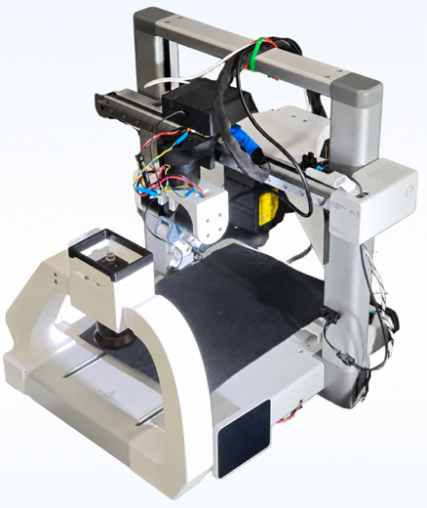
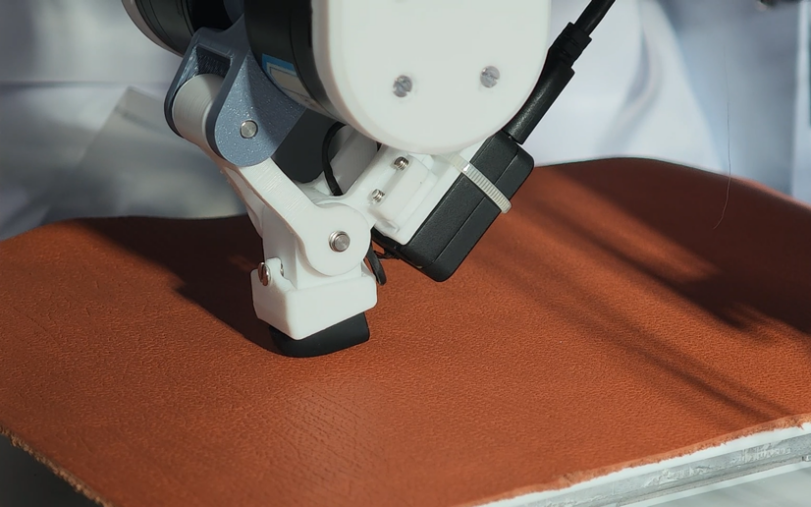
兴业科技与北航联合研发的视触觉数据采集设备
过去,老师傅用手摸来判断;现在,机器人可以先读档案,再去接触。以往,“手感柔软”是一句只能意会的描述;现在,它背后对应的压缩回弹率、表面摩擦系数、弯折阻力,都是可以被测量、记录、传输给机器人的数字。
这份档案的用途,是作为机器人操作皮革之前的预习材料。当机器人需要处理一种新皮料时,先读取这份档案,了解它大致的物理特性,再操作时便有所依据,降低新材料适配时对重复示范与调参的依赖。
认识材料,还要学会操作材料
LVT解决的是“材料是什么”的问题——皮革的身份、物性、区域分布。但机器人在真实场景中面对的问题,还有另一半:该怎么操作这块材料。
这正是TouchNet所指向的方向。与LVT的静态材料描述不同,TouchNet记录的是动态的操作行为:机器人实际接触皮革时的运动轨迹、施力策略,以及接触过程中传感器采集到的实时触觉反馈。
两者之间有清晰的分工。LVT在接触之前告诉机器人“这块皮大概是什么特性”;TouchNet在操作过程中积累“上一次这样的皮,机器人是怎么处理的”。一个是材料先验,一个是操作经验。机器人理解材料的两个层次——认识它,以及与它交互——在这套体系里,分别有了对应的数据来源。
兴业方面强调,TouchNet 正是兴业与北航在密切合作和快速推进的方向,后续我们将基于落地的研发成果与主流的机器人本体公司进行合作验证,这是接下来最关键的检验节点和里程碑。
具身智能,开始需要制造业的经验
过去几十年,中国制造业积累了大量无法被写进说明书的经验——材料判断、工艺直觉、对批次差异的敏感度。这些经验存在于老师傅的手里,存在于一代代生产管理记录里,但从未被系统地转化为机器可以学习的东西。
而今天,具身智能开始真正需要直接学习这些经验。
兴业科技正在尝试做的,是把三十年最熟悉的那部分——皮革材料——作为起点,将这些长期只能存活在人身上的判断,尽可能转化为可采集、可标注、可量化的数据。白皮书以北航与兴业双方名义联合署名,并正在积极探索与更多科研机构、机器人本体公司的标准化合作路径,希望推动柔性材料属性测量流程逐步形成行业共识。
LVT的框架在理论上可以向织物、橡胶、人造革等更广泛的柔性材料品类延伸。但兴业的表述是克制的:“扩展的前提,是先把皮革做到真正不可替代。”
“不是离开制造业去做别的事,而是站在制造业深处,把传统经验变成智能系统可以理解的语言。”
这是兴业对自己正在做的事情的描述。这也是这个故事成立的真正理由——不是因为皮革企业跨界AI,而是因为具身智能开始需要直接理解那些长期沉淀在制造业里的材料经验。
(责任编辑:朱赫)